
We will take what we learned in the previous post and rewrite it to support interprocess communication of our SparkFun Weather Shield from other applications using the gRPC.
Setup a Basic gRPC Server
Before writing any business logic, start off by building the project scaffolding. The scaffolding we will use is found if you read the gRPC Basics tutorial. Our goal is to create a simple RPC server which we can call with a client; afterwords, we’ll focus on writing our business logic. If you don’t know anything about gRPC then checkout this we article on gRPC basics.
Start off by setting up the an empty repository in github and run the following in your terminal:
cd ~/go/src/github.com/bartmika
git clone https://github.com/bartmika/serialreader-server.git
cd serialreader-serverInitialize golang modules.
go mod init github.com/bartmika/serialreader-serverInstall our project’s dependencies.
export GO111MODULE=on # Enable module mode
go get google.golang.org/protobuf/cmd/protoc-gen-go
go get google.golang.org/grpc/cmd/protoc-gen-go-grpc
go get google.golang.org/grpc
go get github.com/golang/protobuf/ptypes/timestamp
go get github.com/spf13/cobra
go get github.com/tarm/serialSetup our initial project structure. We will use this structure to grow our application. Please look at the folder and file names in the “Project Hierarchy” and create them in your computer as blank files.
Project Hierarchy
📁 serialreader-server
│ 📄 main.go
│
└───📁 cmd
| |
| └───📄 hello.go
| 📄 root.go
| 📄 serve.go
| 📄 version.go
|
└───📁 internal
| |
| └───📄 server_impl.go
| 📄 server.go
|
└───📁 proto
|
└───📄 serialreader.protoWhat are going to do? We want our project structured in such a way that it uses the spf13/cobra package so we can easily commands in our application.
Please copy and paste the following code into those empty files.
(1 of 8) main.go
package main // github.com/bartmika/serialreader-server/main.go
import (
"github.com/bartmika/serialreader-server/cmd"
)
func main() {
cmd.Execute()
}(2 of 8) cmd/root.go
package cmd // github.com/bartmika/serialreader-server/cmd/root.go
import (
"fmt"
"os"
"github.com/spf13/cobra"
)
var rootCmd = &cobra.Command{
Use: "serialreader-server",
Short: "Serve time-series data",
Long: `Serve time-series data from a connected Arduino device with an attached 'SparkFun Weather Shield' device over gRPC.`,
Run: func(cmd *cobra.Command, args []string) {
// Do nothing...
},
}
func Execute() {
if err := rootCmd.Execute(); err != nil {
fmt.Fprintln(os.Stderr, err)
os.Exit(1)
}
}(3 of 8) cmd/version.go
package cmd // github.com/bartmika/serialreader-server/cmd/version.go
import (
"fmt"
"github.com/spf13/cobra"
)
func init() {
rootCmd.AddCommand(versionCmd)
}
var versionCmd = &cobra.Command{
Use: "version",
Short: "Print the version number",
Long: `Print the current version that this server is on.`,
Run: func(cmd *cobra.Command, args []string) {
fmt.Println("serialreader-server v1.0")
},
}(4 of 8) proto/serialreader.proto
syntax = "proto3"; // github.com/bartmika/serialreader-server/proto/serialreader.proto
option go_package = "github.com/bartmika/serialreader-server";
package proto;
service SerialReader {
rpc SayHello (HelloRequest) returns (HelloReply) {}
}
// --- HELLO ENDPOINT ---
// The request message containing the user's name.
message HelloRequest {
string name = 1;
}
// The response message containing the greetings
message HelloReply {
string message = 1;
}(5 of 8) internal/server.go
package internal // github.com/bartmika/serialreader-server/internal/server.go
import (
"fmt"
"log"
"net"
"google.golang.org/grpc"
pb "github.com/bartmika/serialreader-server/proto"
)
type SerialReaderServer struct {
port int
grpcServer *grpc.Server
}
func New(port int) *SerialReaderServer {
return &SerialReaderServer{
port: port,
grpcServer: nil,
}
}
// Function will consume the main runtime loop and run the business logic
// of the application.
func (s *SerialReaderServer) RunMainRuntimeLoop() {
// Open a TCP server to the specified localhost and environment variable
// specified port number.
lis, err := net.Listen("tcp", fmt.Sprintf(":%v", s.port))
if err != nil {
log.Fatalf("failed to listen: %v", err)
}
// Initialize our gRPC server using our TCP server.
grpcServer := grpc.NewServer()
// Save reference to our application state.
s.grpcServer = grpcServer
// For debugging purposes only.
log.Printf("gRPC server is running.")
// Block the main runtime loop for accepting and processing gRPC requests.
pb.RegisterSerialReaderServer(grpcServer, &SerialReaderServerImpl{
// DEVELOPERS NOTE:
// We want to attach to every gRPC call the following variables...
// ...
})
if err := grpcServer.Serve(lis); err != nil {
log.Fatalf("failed to serve: %v", err)
}
}
// Function will tell the application to stop the main runtime loop when
// the process has been finished.
func (s *SerialReaderServer) StopMainRuntimeLoop() {
log.Printf("Starting graceful shutdown now...")
// Finish any RPC communication taking place at the moment before
// shutting down the gRPC server.
s.grpcServer.GracefulStop()
}(6 of 8) internal/server_impl.go
package internal // github.com/bartmika/serialreader-server/internal/server_impl.go
import (
"context"
"log"
pb "github.com/bartmika/serialreader-server/proto"
)
type SerialReaderServerImpl struct {
pb.SerialReaderServer
}
func (s *SerialReaderServerImpl) SayHello(ctx context.Context, in *pb.HelloRequest) (*pb.HelloReply, error) {
log.Printf("Received: %v", in.GetName())
return &pb.HelloReply{Message: "Hello " + in.GetName()}, nil
}(7 of 8) cmd/serve.go
package cmd // github.com/bartmika/serialreader-server/cmd/serve.go
import (
"os"
"os/signal"
"syscall"
"github.com/spf13/cobra"
server "github.com/bartmika/serialreader-server/internal"
)
var (
port int
)
func init() {
// The following are optional and will have defaults placed when missing.
serveCmd.Flags().IntVarP(&port, "port", "p", 50051, "The port to run this server on")
// Make this sub-command part of our application.
rootCmd.AddCommand(serveCmd)
}
func doServe() {
// Setup our server.
server := server.New(port)
// DEVELOPERS CODE:
// The following code will create an anonymous goroutine which will have a
// blocking chan `sigs`. This blocking chan will only unblock when the
// golang app receives a termination command; therfore the anyomous
// goroutine will run and terminate our running application.
//
// Special Thanks:
// (1) https://gobyexample.com/signals
// (2) https://guzalexander.com/2017/05/31/gracefully-exit-server-in-go.html
//
sigs := make(chan os.Signal, 1)
signal.Notify(sigs, syscall.SIGINT, syscall.SIGTERM)
go func() {
<-sigs // Block execution until signal from terminal gets triggered here.
server.StopMainRuntimeLoop()
}()
server.RunMainRuntimeLoop()
}
var serveCmd = &cobra.Command{
Use: "serve",
Short: "Run the gRPC server",
Long: `Run the gRPC server to allow other services to access the serial reader`,
Run: func(cmd *cobra.Command, args []string) {
doServe()
},
}(8 of 8) cmd/hello.go
package cmd // github.com/bartmika/serialreader-server/cmd/hello.go
import (
"context"
"fmt"
"log"
"time"
"github.com/spf13/cobra"
"google.golang.org/grpc"
// "google.golang.org/grpc/credentials"
pb "github.com/bartmika/serialreader-server/proto"
)
var (
name string
)
func init() {
// The following are required.
helloCmd.Flags().StringVarP(&name, "name", "n", "Anonymous", "The name to send the server.")
helloCmd.MarkFlagRequired("name")
// The following are optional and will have defaults placed when missing.
helloCmd.Flags().IntVarP(&port, "port", "p", 50051, "The port of our server.")
rootCmd.AddCommand(helloCmd)
}
func doHello() {
// Set up a direct connection to the gRPC server.
conn, err := grpc.Dial(
fmt.Sprintf(":%v", port),
grpc.WithInsecure(),
grpc.WithBlock(),
)
if err != nil {
log.Fatalf("did not connect: %v", err)
}
// Set up our protocol buffer interface.
client := pb.NewSerialReaderClient(conn)
defer conn.Close()
ctx, cancel := context.WithTimeout(context.Background(), time.Second)
defer cancel()
// Perform our gRPC request.
r, err := client.SayHello(ctx, &pb.HelloRequest{Name: name})
if err != nil {
log.Fatalf("could not greet: %v", err)
}
// Print out the gRPC response.
log.Printf("Server Response: %s", r.GetMessage())
}
var helloCmd = &cobra.Command{
Use: "hello",
Short: "Send hello message to gRPC server",
Long: `Connect to the gRPC server and send a hello message. Command used to test out that the server is running.`,
Run: func(cmd *cobra.Command, args []string) {
doHello()
},
}Usage of the Basic gRPC Server
In your primary terminal, please run the server by entering the following command:
go run main.go serveYou should see something like this:

If you see this then you have successfully setup the basic gRPC server. In a another terminal window or tab, please execute the following command to verify our server is working.
go run main.go hello --name="Bartlomiej"You should see something like this:
Good stuff, our server works! Now let’s build a gRPC service definition over our serial reader.
Integrate the SparkFun Weather Shield Reader
Before we begin, I am assuming you have successfully read through our previous article before continuing. If you did not the next steps will note make sense.
Take a look at the following folder structure and create the necessary empty files:
Project Hierarchy
📁 serialreader-server
│ 📄 main.go
│
└───📁 cmd
| |
| └───📄 get_data.go (*)
| 📄 hello.go
| 📄 root.go
| 📄 serve.go
| 📄 version.go
|
└───📁 internal
| |
| └───📄 arduino_reader.go (*)
| 📄 server_impl.go
| 📄 server.go
|
└───📁 proto
|
└───📄 serialreader.protoNotice the asterisks (*), those are the new files you will need to create.
Please copy and paste the following files. It’s important to note you need to override the entire file when pasting!
(1 of 6) proto/serialreader.proto
syntax = "proto3"; // github.com/bartmika/serialreader-server/proto/serialreader.proto
option go_package = "github.com/bartmika/serialreader-server";
package proto;
import "google/protobuf/timestamp.proto";
service SerialReader {
rpc SayHello (HelloRequest) returns (HelloReply) {}
rpc GetSparkFunWeatherShieldData (GetTimeSeriesData) returns (SparkFunWeatherShieldTimeSeriesData) {}
}
// --- HELLO ENDPOINT ---
// The request message containing the user's name.
message HelloRequest {
string name = 1;
}
// The response message containing the greetings
message HelloReply {
string message = 1;
}
// --- POLLING ENDPOINT ---
message GetTimeSeriesData {}
message SparkFunWeatherShieldTimeSeriesData {
bool status = 1;
google.protobuf.Timestamp timestamp = 2;
float humidityValue = 3;
string humidityUnit = 4;
float temperatureValue = 5;
string temperatureUnit = 6;
float pressureValue = 7;
string pressureUnit = 8;
float temperatureBackupValue = 9;
string temperatureBackupUnit = 10;
float altitudeValue = 11;
string altitudeUnit = 12;
float illuminanceValue = 13;
string illuminanceUnit = 14;
float soilMoistureValue = 15;
string soilMoistureUnit = 16;
}(2 of 6) internal/arduino_reader.go
package internal // github.com/bartmika/serialreader-server/internal/arduino_reader.go
import (
"fmt"
"encoding/json"
"log"
"time"
"github.com/tarm/serial"
)
const RX_BYTE = "1"
// The time-series data structure used to store all the data that will be
// returned by the `SparkFun Weather Shield` Arduino device.
type TimeSeriesData struct {
Status string `json:"status,omitempty"`
Runtime int `json:"runtime,omitempty"`
Id int `json:"id,omitempty"`
HumidityValue float32 `json:"humidity_value,omitempty"`
HumidityUnit string `json:"humidity_unit,omitempty"`
TemperatureValue float32 `json:"temperature_primary_value,omitempty"`
TemperatureUnit string `json:"temperature_primary_unit,omitempty"`
PressureValue float32 `json:"pressure_value,omitempty"`
PressureUnit string `json:"pressure_unit,omitempty"`
TemperatureBackupValue float32 `json:"temperature_secondary_value,omitempty"`
TemperatureBackupUnit string `json:"temperature_secondary_unit,omitempty"`
AltitudeValue float32 `json:"altitude_value,omitempty"`
AltitudeUnit string `json:"altitude_unit,omitempty"`
IlluminanceValue float32 `json:"illuminance_value,omitempty"`
IlluminanceUnit string `json:"illuminance_unit,omitempty"`
Timestamp int64 `json:"timestamp,omitempty"`
}
// The abstraction of the `SparkFun Weather Shield` reader.
type ArduinoReader struct {
serialPort *serial.Port
}
// Constructor used to intialize the serial reader designed to communicate
// with Arduino configured for the `SparkFun Weather Shield` settings.
func NewArduinoReader(devicePath string) *ArduinoReader {
log.Printf("READER: Attempting to connect Arduino device...")
c := &serial.Config{Name: devicePath, Baud: 9600}
s, err := serial.OpenPort(c)
if err != nil {
log.Fatal(err)
}
// DEVELOPERS NOTE:
// The following code will warm up the Arduino device before we are
// able to make calls to the external sensors.
log.Printf("READER: Waiting for Arduino external sensors to warm up")
ar := &ArduinoReader{serialPort: s}
ar.GetSparkFunWeatherShieldData()
time.Sleep(5 * time.Second)
ar.GetSparkFunWeatherShieldData()
time.Sleep(5 * time.Second)
return ar
}
// Function returns the JSON data of the instrument readings from our Arduino
// device configured for the `SparkFun Weather Shield` settings.
func (ar *ArduinoReader) GetSparkFunWeatherShieldData() *TimeSeriesData {
// DEVELOPERS NOTE:
// (1) The external device (Arduino) is setup to standby idle until it
// receives a poll request from this code, once a poll request has
// been submitted then all the sensors get polled and their data is
// returned.
// (2) Please look at the following code to understand how the external
// device works in: <TODO ADD>
//
// (3) The reason for design is as follows:
// (a) The external device does not have a real-time clock
// (b) We don't want to add any real-time clock shields because
// extra hardware means it costs more.
// (c) We don't want to write complicated code of synching time
// from this code because it will make the code complicated.
// (d) Therefore we chose to make sensor polling be event based
// and this code needs to send a "poll request".
// STEP 1:
// We need to send a single byte to the external device (Arduino) which
// will trigger a polling event on all the sensors.
n, err := ar.serialPort.Write([]byte(RX_BYTE))
if err != nil {
log.Fatal(err)
}
// STEP 2:
// The external device will poll the device, we need to make our main
// runtime loop to be blocked so we wait until the device finishes and
// returns all the sensor measurements.
buf := make([]byte, 1028)
n, err = ar.serialPort.Read(buf)
if err != nil {
log.Fatal(err)
}
// STEP 3:
// Check to see if ANY data was returned from the external device, if
// there was then we load up the string into a JSON object.
var tsd TimeSeriesData
err = json.Unmarshal(buf[:n], &tsd)
if err != nil {
return nil
}
tsd.Timestamp = time.Now().Unix()
return &tsd
}
// Function used to print to the console the time series data.
func PrettyPrintTimeSeriesData(tsd *TimeSeriesData) {
fmt.Println("Status: ", tsd.Status)
fmt.Println("Runtime: ", tsd.Runtime)
fmt.Println("Status: ", tsd.Id)
fmt.Println("HumidityValue: ", tsd.HumidityValue)
fmt.Println("HumidityUnit: ", tsd.HumidityUnit)
fmt.Println("TemperatureValue: ", tsd.TemperatureValue)
fmt.Println("TemperatureUnit: ", tsd.TemperatureUnit)
fmt.Println("PressureValue: ", tsd.PressureValue)
fmt.Println("PressureUnit: ", tsd.PressureUnit)
fmt.Println("TemperatureBackupValue: ", tsd.TemperatureBackupValue)
fmt.Println("TemperatureBackupUnit: ", tsd.TemperatureBackupUnit)
fmt.Println("AltitudeValue: ", tsd.AltitudeValue)
fmt.Println("AltitudeUnit: ", tsd.AltitudeUnit)
fmt.Println("IlluminanceValue: ", tsd.IlluminanceValue)
fmt.Println("IlluminanceUnit: ", tsd.IlluminanceUnit)
fmt.Println("Timestamp: ", tsd.Timestamp)
}(3 of 6) internal/server.go
package internal // github.com/bartmika/serialreader-server/internal/server.go
import (
"fmt"
"log"
"net"
"google.golang.org/grpc"
pb "github.com/bartmika/serialreader-server/proto"
)
type SerialReaderServer struct {
port int
arduinoDevicePath string
arduinoReader *ArduinoReader
grpcServer *grpc.Server
}
func New(arduinoDevicePath string, port int) *SerialReaderServer {
return &SerialReaderServer{
port: port,
arduinoDevicePath: arduinoDevicePath,
arduinoReader: nil,
grpcServer: nil,
}
}
// Function will consume the main runtime loop and run the business logic
// of the application.
func (s *SerialReaderServer) RunMainRuntimeLoop() {
// Open a TCP server to the specified localhost and environment variable
// specified port number.
lis, err := net.Listen("tcp", fmt.Sprintf(":%v", s.port))
if err != nil {
log.Fatalf("failed to listen: %v", err)
}
// Establish our device connection.
arduinoReader := NewArduinoReader(s.arduinoDevicePath)
// Initialize our gRPC server using our TCP server.
grpcServer := grpc.NewServer()
// Save reference to our application state.
s.grpcServer = grpcServer
s.arduinoReader = arduinoReader
// For debugging purposes only.
log.Printf("gRPC server is running.")
// Block the main runtime loop for accepting and processing gRPC requests.
pb.RegisterSerialReaderServer(grpcServer, &SerialReaderServerImpl{
// DEVELOPERS NOTE:
// We want to attach to every gRPC call the following variables...
arduinoReader: arduinoReader,
})
if err := grpcServer.Serve(lis); err != nil {
log.Fatalf("failed to serve: %v", err)
}
}
// Function will tell the application to stop the main runtime loop when
// the process has been finished.
func (s *SerialReaderServer) StopMainRuntimeLoop() {
log.Printf("Starting graceful shutdown now...")
s.arduinoReader = nil
// Finish any RPC communication taking place at the moment before
// shutting down the gRPC server.
s.grpcServer.GracefulStop()
}(4 of 6) internal/server_impl.go
package internal // github.com/bartmika/serialreader-server/internal/server_impl.go
import (
"context"
"log"
"github.com/golang/protobuf/ptypes"
pb "github.com/bartmika/serialreader-server/proto"
)
type SerialReaderServerImpl struct {
arduinoReader *ArduinoReader
pb.SerialReaderServer
}
func (s *SerialReaderServerImpl) SayHello(ctx context.Context, in *pb.HelloRequest) (*pb.HelloReply, error) {
log.Printf("Received: %v", in.GetName())
return &pb.HelloReply{Message: "Hello " + in.GetName()}, nil
}
func (s *SerialReaderServerImpl) GetSparkFunWeatherShieldData(ctx context.Context, in *pb.GetTimeSeriesData) (*pb.SparkFunWeatherShieldTimeSeriesData, error) {
datum := s.arduinoReader.GetSparkFunWeatherShieldData()
return &pb.SparkFunWeatherShieldTimeSeriesData{
Status: true,
Timestamp: ptypes.TimestampNow(), // Note: https://godoc.org/github.com/golang/protobuf/ptypes#Timestamp
HumidityValue: datum.HumidityValue,
HumidityUnit: datum.HumidityUnit,
TemperatureValue: datum.TemperatureValue,
TemperatureUnit: datum.TemperatureUnit,
PressureValue: datum.PressureValue,
PressureUnit: datum.PressureUnit,
TemperatureBackupValue: datum.TemperatureBackupValue,
TemperatureBackupUnit: datum.TemperatureBackupUnit,
AltitudeValue: datum.AltitudeValue,
AltitudeUnit: datum.AltitudeUnit,
IlluminanceValue: datum.IlluminanceValue,
IlluminanceUnit: datum.IlluminanceUnit,
}, nil
}(5 of 6) cmd/serve.go
package cmd // github.com/bartmika/serialreader-server/cmd/serve.go
import (
"os"
"os/signal"
"syscall"
"github.com/spf13/cobra"
server "github.com/bartmika/serialreader-server/internal"
)
var (
port int
arduinoDevicePath string
)
func init() {
// The following are required.
serveCmd.Flags().StringVarP(&arduinoDevicePath, "arduino_path", "f", "/dev/cu.usbmodem14201", "The location of the connected arduino device on your computer.")
serveCmd.MarkFlagRequired("arduino_path")
// The following are optional and will have defaults placed when missing.
serveCmd.Flags().IntVarP(&port, "port", "p", 50051, "The port to run this server on")
// Make this sub-command part of our application.
rootCmd.AddCommand(serveCmd)
}
func doServe() {
// Setup our server.
server := server.New(arduinoDevicePath, port)
// DEVELOPERS CODE:
// The following code will create an anonymous goroutine which will have a
// blocking chan `sigs`. This blocking chan will only unblock when the
// golang app receives a termination command; therfore the anyomous
// goroutine will run and terminate our running application.
//
// Special Thanks:
// (1) https://gobyexample.com/signals
// (2) https://guzalexander.com/2017/05/31/gracefully-exit-server-in-go.html
//
sigs := make(chan os.Signal, 1)
signal.Notify(sigs, syscall.SIGINT, syscall.SIGTERM)
go func() {
<-sigs // Block execution until signal from terminal gets triggered here.
server.StopMainRuntimeLoop()
}()
server.RunMainRuntimeLoop()
}
var serveCmd = &cobra.Command{
Use: "serve",
Short: "Run the gRPC server",
Long: `Run the gRPC server to allow other services to access the serial reader`,
Run: func(cmd *cobra.Command, args []string) {
doServe()
},
}(6 of 6) cmd/get_data.go
package cmd // github.com/bartmika/serialreader-server/cmd/get_data.go
import (
"context"
"fmt"
"log"
"time"
"github.com/spf13/cobra"
"google.golang.org/grpc"
// "google.golang.org/grpc/credentials"
pb "github.com/bartmika/serialreader-server/proto"
)
func init() {
// The following are optional and will have defaults placed when missing.
getDataCmd.Flags().IntVarP(&port, "port", "p", 50051, "The port of our server.")
rootCmd.AddCommand(getDataCmd)
}
func doGetData() {
// Set up a direct connection to the gRPC server.
conn, err := grpc.Dial(
fmt.Sprintf(":%v", port),
grpc.WithInsecure(),
grpc.WithBlock(),
)
if err != nil {
log.Fatalf("did not connect: %v", err)
}
// Set up our protocol buffer interface.
client := pb.NewSerialReaderClient(conn)
defer conn.Close()
ctx, cancel := context.WithTimeout(context.Background(), time.Second)
defer cancel()
// Perform our gRPC request.
tsd, err := client.GetSparkFunWeatherShieldData(ctx, &pb.GetTimeSeriesData{})
if err != nil {
log.Fatalf("could not greet: %v", err)
}
// Print out the gRPC response.
log.Println("Server Response:")
fmt.Println("Status: ", tsd.Status)
fmt.Println("HumidityValue: ", tsd.HumidityValue)
fmt.Println("HumidityUnit: ", tsd.HumidityUnit)
fmt.Println("TemperatureValue: ", tsd.TemperatureValue)
fmt.Println("TemperatureUnit: ", tsd.TemperatureUnit)
fmt.Println("PressureValue: ", tsd.PressureValue)
fmt.Println("PressureUnit: ", tsd.PressureUnit)
fmt.Println("TemperatureBackupValue: ", tsd.TemperatureBackupValue)
fmt.Println("TemperatureBackupUnit: ", tsd.TemperatureBackupUnit)
fmt.Println("AltitudeValue: ", tsd.AltitudeValue)
fmt.Println("AltitudeUnit: ", tsd.AltitudeUnit)
fmt.Println("IlluminanceValue: ", tsd.IlluminanceValue)
fmt.Println("IlluminanceUnit: ", tsd.IlluminanceUnit)
fmt.Println("Timestamp: ", tsd.Timestamp)
}
var getDataCmd = &cobra.Command{
Use: "get_data",
Short: "Poll data from the gRPC server",
Long: `Connect to the gRPC server and poll the time series data. Command used to test out that the server is running.`,
Run: func(cmd *cobra.Command, args []string) {
doGetData()
},
}Usage of our Serial Data Reader gRPC Server
In your primary terminal, please run the server by entering the following command:
go run main.go serve -f="/dev/cu.usbmodem14401"Please note that the value /dev/cu.usbmodem14401 was taken from the Arduino IDE, if you don’t know how to get this value, please read this article.
In another terminal window or terminal tab, please execute the following command to verify our server is working.
go run main.go get_dataYou should see something like this:
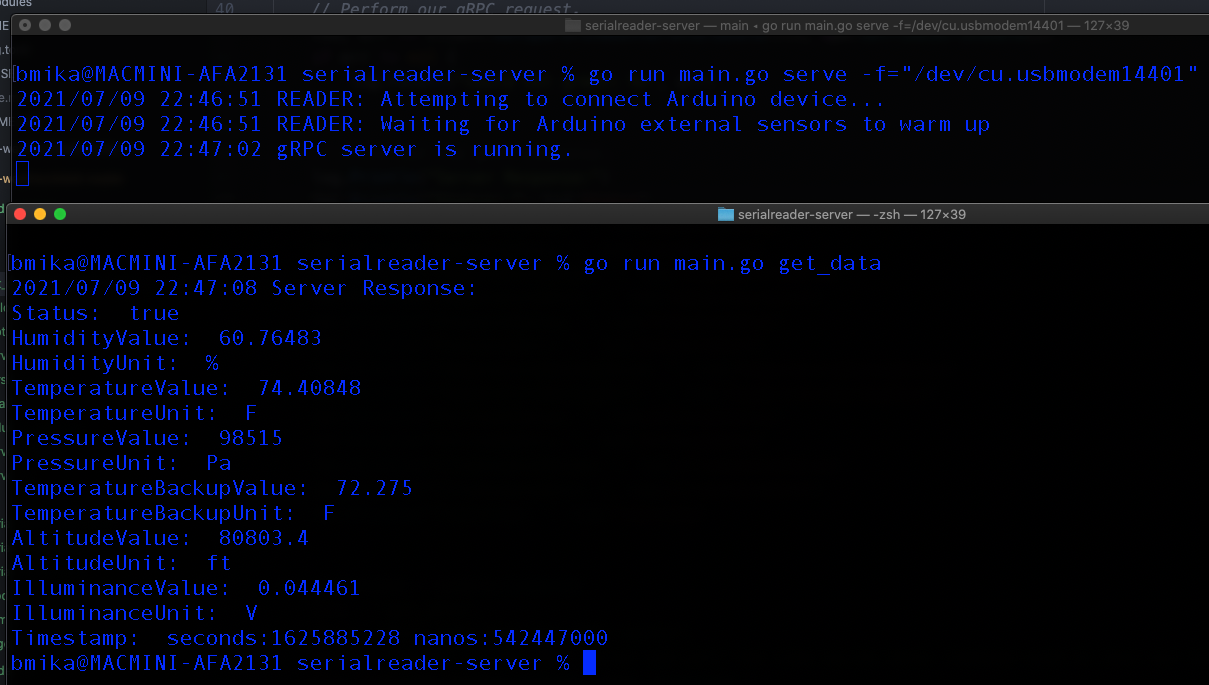
If you see the above, congratulations! You have written a gRPC server overtop your serial reader so you can now write an unlimited applications to poll the data.
Where do we go from here?
You know how to read from the device and you now know how to serve it across many localhost applications or remote applications using gRPC. The next logic step is figuring out how to store the time-series data we retrieved. In the next post we will discuss building a gRPC server for storing and retrieving data.
See also
- How to Containerize a Golang App With Docker for Development and Production
- How to Write a Golang App Remotely on a Raspberry Pi Using Atom
- How to Perform RSA Encryption in Javascript (React.js) and Golang
- Quickstart to Building Golang Apps using IPFS
- Docker Learning Resources for Absolute Beginners Programming With Golang